Robotics
As to robotics, it is with strong enthusiasm that I have participated in many related activities during my undergraduate study. I have extended my interests to various types of robots, including my 3d-printed rehabilitation robotic arm, the Rethink Baxter (a cobot), ABB industrial robots, UAV and AGV. I developed my skills not only in controls mechanical design but also in controls and PCB designing as well.
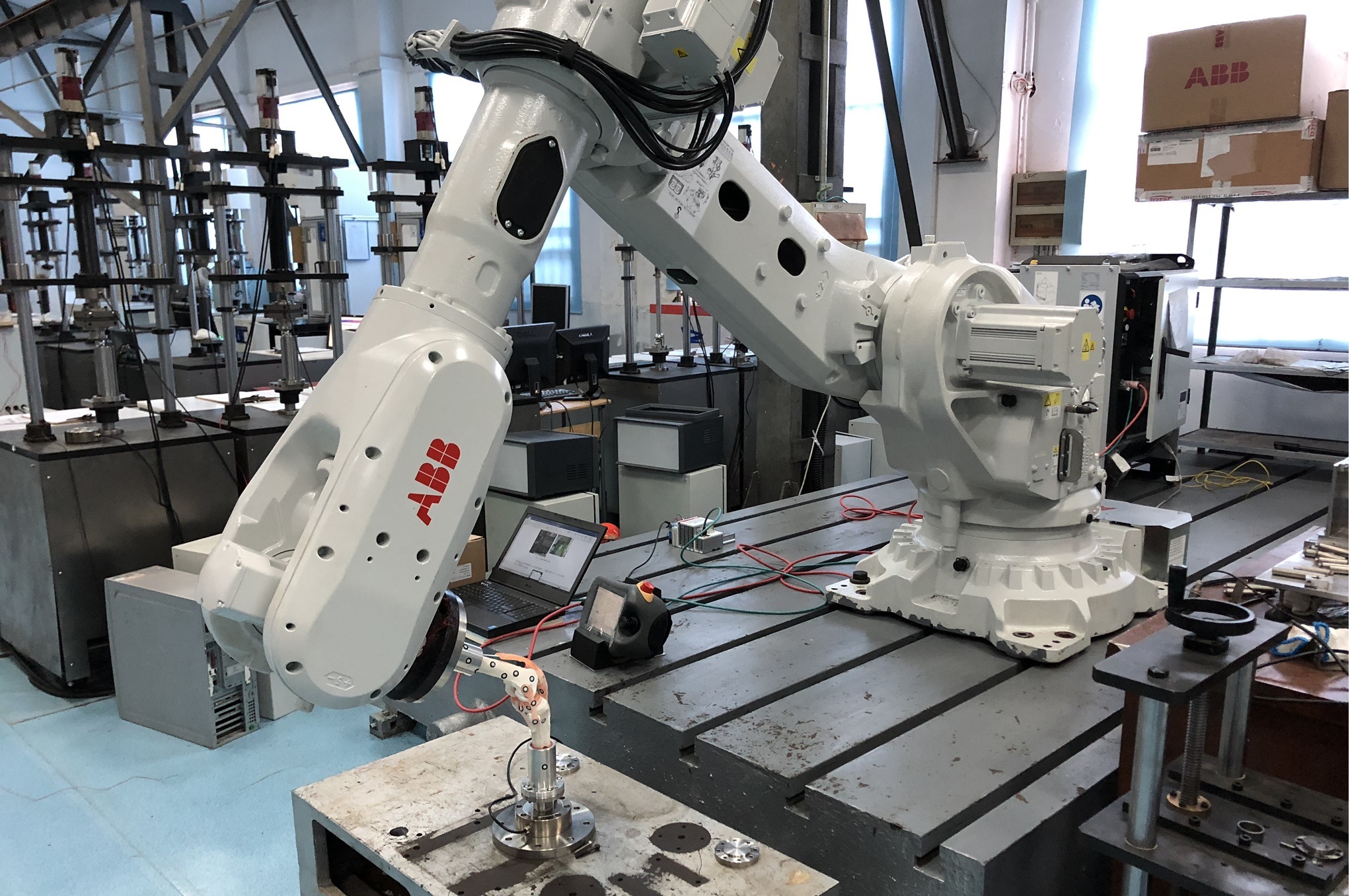
- a knee joint controlled by ABB IRB6700 robotic arm
Biomechanical Analysis of Knee-Joint Prosthesis
12/2018-07/2019
Final Year Project, Orthotek Lab, Supervisor: Dr. Zikai Hua
-
Used an ABB IRB6700 robotic arm to simulate physiological loading conditions and to perform kinematic (normal walking) test on a human knee-joint prosthesis.
-
Planned the robot path according to anterior-posterior translation, medial-lateral rotation, flexion-extension rotation of knee-joint in MATLAB Robotic Toolbox and programmed in RobotStudio.

- the optical measuring system
-
Controlled and detected the physiological loading by using a multidimensional force sensor, Beckhoff embedded PC, and secondary developed software based on TwinCat.
-
Designed new fixtures, including a flange, an adapter flange, trapezoidal grooves, and two barrels for PMMA solidification for linking knee-joint prosthesis with robotic arm.
-
Established a dynamic optical measuring system to observe knee-joint kinematics in gait after collecting data from ARAMIS, GOM by sticking markers on the surface of prosthesis.
Design of A Medical Rehabilitation Robotic Arm

- 4 DOF robotic arm equipped with Leap Motion
01/2018-06/2018
Third Year Project, First Prize in Chinese Service Robot Competition (Innovative design of rehabilitation robot) 2018, Supervisor: Dr. Bin He
-
Designed a prototype of a four DOF robotic arm, which can predict patient’s arm movement and help do rehabilitation exercises.
-
Developed an integrated system of a robotic arm, a multiple sensor, a windows forms application programmed in c#, a servos’ control system in Arduino where messages are detected and exchanged through the serial communication ports.
- demo
-
Deduced an empirical formula of the multiple sensor - Leap Motion to control four servos with detected coordinate points after many attempts.
-
Set a parameter to regulate the sensitivity of the robotic arm for different patients.
-
Simulated and conducted force analysis in Ansys under various situations.
Application of Baxter from Rethink Robotics
- Baxter Oline Upper Body Imitation
06/2018-08/2018
Research Assistant in The Visual Interactivity Group, Supervisor: Dr. Long Li
-
Improved the response rate of Baxter when imitating human upper body motion in Moveit!, ROS.
-
Successfully guided Baxter to pick up a delicate wineglass and pour liquids into another bottle.
-
Designed a soft 2-finger end effector to grab objects of different shapes and texture.
A Novel FPV Racing Drone

- the racing drone we made
05/2018-06/2018
One of Two Team members, First Prize in China Aerial Robotics Competition 2018, Supervisor: Dr. Di Wang
-
Built an FPV with 4 brushless motors (4800kv) with 3-leaf propellers on each, a carbon fiber frame, 4 in 1 ESCs, F3 flight controller, and the altimeter, barometer, video transmitter, etc. on boards.
-
Tuned the PID to make the drone both steady and agile for the match.
-
3D-printed a knife rest for a ceramic blade to penetrate several balloons on the game day.
Programming and Design of a PCB Layout of an AGV
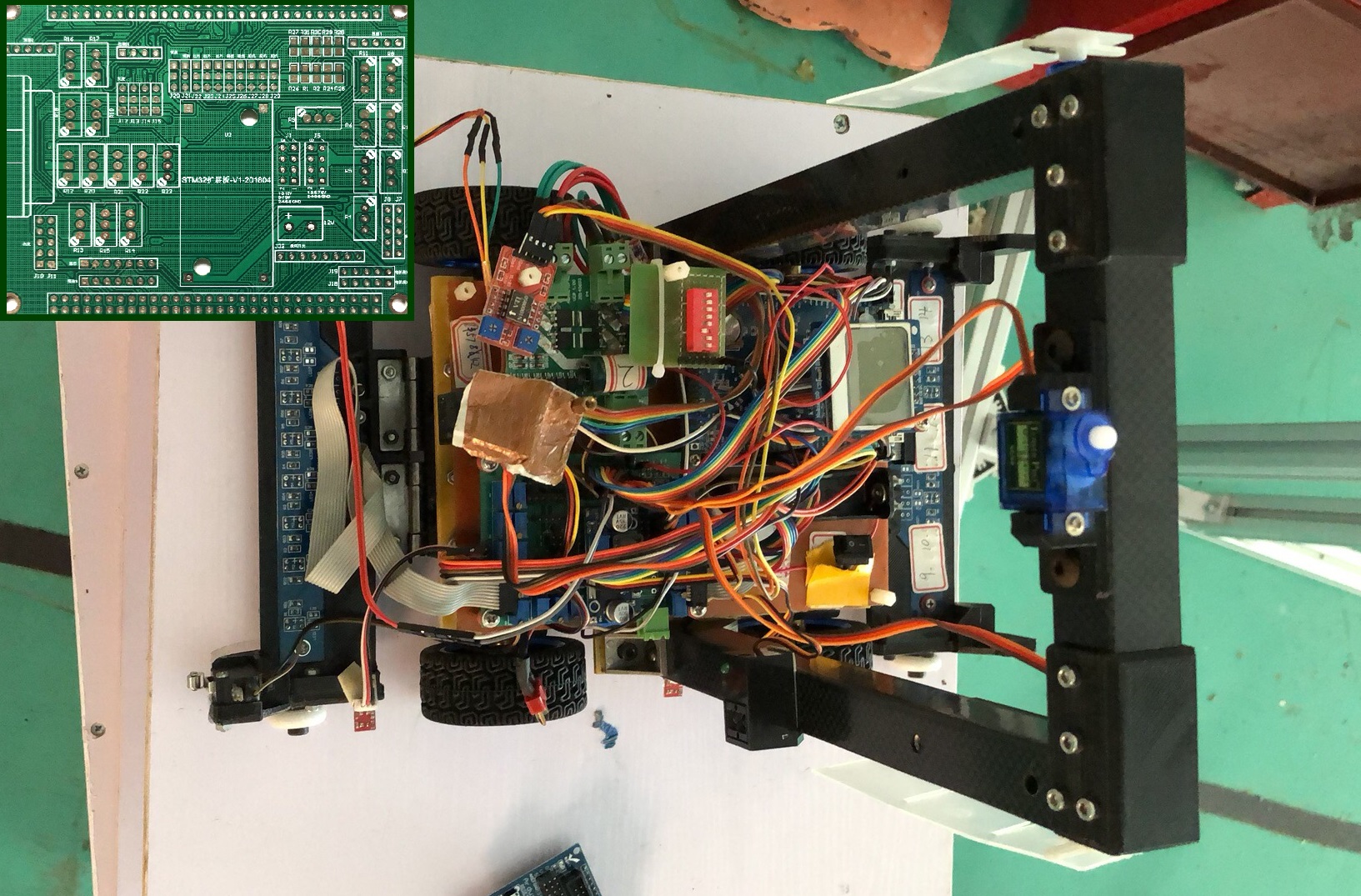
- the PCB I designed for AGV which was messed up with Dupont cables
11/2017-03/2018
Team leader, Third Prize in China Robot Match (Travel and Security) 2018, Supervisor: Dr. Di Wang
-
Programmed the vehicle for passing through different kinds of terrain and make corresponding actions (driven by four servos) after scanning QR codes.
-
Designed and soldered an expansion PCB to be set on the STM32 for improving the reliability instead of connecting different parts with Dupont cables.
-
Added an automatic steering system by installing 16 gray-scale sensors, 4 ultrasonic sensors and optimized the algorithm to have a quick response.